司")

手 機:13688936950
郵 箱:ty13926809285@163.com
電 話:13926809285
網 址:http://www.zhhbpj.com/
地 址:東(dōng)莞市塘廈鎮蛟(jiāo)乙塘村地堂嶺

工作原理
能(néng)夠模仿人手和臀的某(mǒu)些動作功能,用固定程式抓取、搬運物件或操作(zuò)工具的自動操作裝(zhuāng)置。不僅如此它還可代替(tì)人的繁重勞動以實現生產的機械化和自動化。工作完成主要由手部實(shí)踐(jiàn)操作、機械 運動機構(gòu)和機械控製(zhì)係統三大部分相互配合速接而組成。手部是用來抓(zhuā)持工件(或工具)的(de)部(bù)件,根據被抓持物件(jiàn)的(de)形狀、尺寸、重量、材(cái)料和(hé)作業(yè)要求而有多種結構形(xíng)式。運動(dòng)機構及控製係統可以使手部完成各種轉動(搖動)、移動或複合運動來實現規定的動作、改變(biàn)被抓持物(wù)件的位(wèi)置和姿勢。運動機構(gòu)的升降、伸(shēn)縮、旋轉等獨立運動方式完成抓取和(hé)擺放物體。
特點
1、控(kòng)製器內(nèi)增加完善保護功能,為操作者及注塑機(jī)提(tí)供完善的保護。可根據客戶需求修改特殊程序,以符合特殊模具及夾具之要(yào)求。
2、掌上(shàng)型操作器(qì),可切換中英文操作畫麵,簡單易學。多種功能及程(chéng)序提供選擇,可(kě)自動檢測故障並記錄,便(biàn)於維修及解決問題。
3、針對大型和(hé)重(chóng)量重的產品所設計的機械手,適用於鎖模力大可到3200T大(dà)型射出成型機,可取出產品重到50KG含(hán)治具。
4、大型(xíng)牛頭式機械手,開放式結構設計,治具應用空間範圍更大(dà),手臂上(shàng)升空間不受限製,可取出較大型的產品。
5、手臂上下,引拔采用齒輪齒條傳動,傳(chuán)動平穩,耐磨,堅(jiān)固耐用,剛性更強,引拔(bá)采用無縫鋼管,剛性更強。
6、牛頭機構重心後置使用力臂更短運行更平穩。
7、有3軸AC伺服驅動成品臂(bì)上下,前後橫走采用高響應(yīng)AC服馬達傳(chuán)動小(xiǎo)取出時間0.7秒。
8、本體(tǐ)結構高剛性設計,結構穩定震動小,耐久壽命長。
9、高性能AC伺(sì)服馬達配合高精度線性滑軌速度快噪音低,定位準度(dù)可達0.1mm。
10、治具回(huí)路:模內快速下降取物,模(mó)外慢速下降置物,具“快拿輕放”動作功能,針對不同(tóng)產品不同(tóng)治具(jù),實(shí)現穩定、完美的取出動作。
11、程序(xù)可依據動作需(xū)求彈性設置。應用於快速取出,多樣的取(qǔ)出與埋入應用,或應用在較複雜的自動化場合。能實現各種特殊動作,如排(pái)列,堆放,計數,抽樣。
12、還可定製AC/BC等末端旋轉(zhuǎn)軸(zhóu),滿(mǎn)足客戶不同產品(pǐn)的需求。
13、多重保護裝置:各軸均設置極限開(kāi)關(guān),在各方向終黏位置均裝有防撞裝置,可有效防止操作失控。完(wán)善的軟硬體雙重保護功能,確保注塑機(jī)與機械手的運行可靠。
14、組件,結構設計均采(cǎi)用無給油裝(zhuāng)置(zhì),機械保(bǎo)養簡易(yì),壽命長。(導軌,滑塊要定期注油;氣缸遵樣要定期抹黃油)。
15、結構輕量化設計、減鄲速勒部件的重量。遂到好的加/減速度(dù),並與微電腦控製係統良好配合。可大幅度節省電力。
16、電子元件均采用(yòng)知名品牌產品,品質穩定且互換性好。
17、安(ān)裝機械手,可增加產能、降低產品不良率、保障操作人(rén)員的、減(jiǎn)少人工、精準控製生產量、減少浪費。
產(chǎn)品應用
牛頭機專為大型射出成(chéng)型機械設計,可用於鎖模力高達3200T,是大(dà)型家電工業自(zì)動(dòng)化的適合應用於尺寸較(jiào)大注塑產品取出以及需埋入五金(jīn)注塑產品,廣泛應用於汽車件、家電外殼(ké)及物流棧板等大型(xíng)件注塑成型的取出。除此之外它還能(néng)與周邊設備配合使用適用起大型注塑機配套成品及水口料的取出,取出產品重量可達50KG(含治具重(chóng)量)。
選配

標配

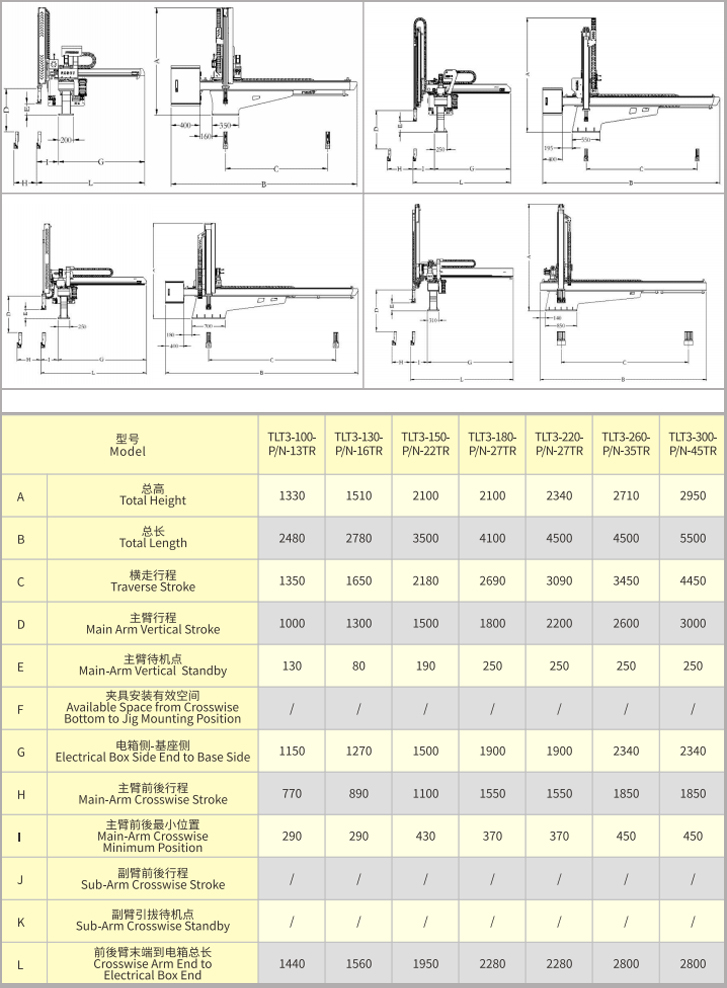
機械手外(wài)型尺寸圖(tú)
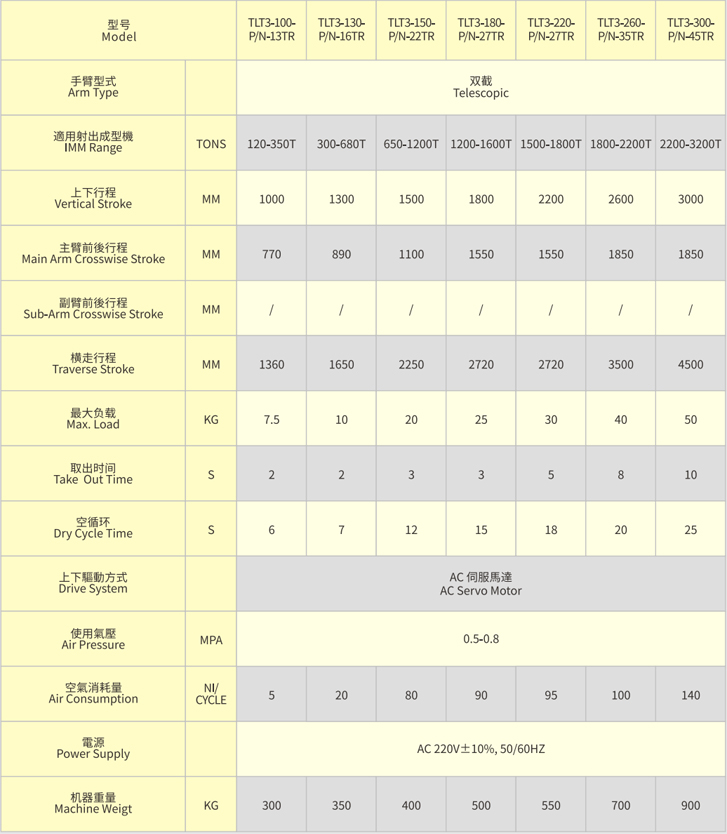
產品規格


機械製造(zào)有限公司")